
domingo, 21 de diciembre de 2014
lunes, 15 de diciembre de 2014
LAS CAJAS DE CAMBIO MANUALES


La caja de cambios es un elemento situado entre el embrague y el eje motriz, aprovecha al máximo la potencia del motor para vencer las variables resistencias del vehículo al desplazarse, también modifica la velocidad adaptandose al par motor según las circunstancias.
Si no fuese por la existencia de la caja de cambios en sí, ni siguiera podríamos vencer la inercia del vehículo en reposo para poder ponerlo en movimiento.
Sin lugar a dudas es uno de los sistemas más prácticos utilizados hasta hoy en día, en lo que se refiere a la transmsión de fuerzas.
El sistema de cambio de marchas manual ha evolucionado notablemente desde los primeros mecanismos de caja de cambios de marchas manuales sin dispositivos de sincronización hasta las actuales cajas de cambio sincronizadas de dos ejes.
Independientemente de la disposición transversal o longitudinal y delantera o trasera, las actuales cajas de cambios manuales son principalmente de dos tipos:
Constitución de tres ejes: un eje primario recibe el par del motor a través del embrague y lo transmite a un eje intermediario. Éste a su vez lo transmite a un eje secundario de salida, coaxial con el eje primario, que acciona el grupo diferencial.
Constitución de dos ejes: un eje primario recibe el par del motor y lo transmite de forma directa a uno secundario de salida de par que acciona el grupo diferencial.
En ambos tipos de cajas manuales los piñones utilizados actualmente en los ejes son de dentado helicoidal, el cual presenta la ventaja de que la transmisión de par se realiza a través de dos dientes simultáneamente en lugar de uno como ocurre con el dentado recto tradicional siendo además la longitud de engrane y la capacidad de carga mayor. Esta mayor suavidad en la transmisión de esfuerzo entre piñones se traduce en un menor ruido global de la caja de cambios. En la marcha atrás se pueden utilizar piñones de dentado recto ya que a pesar de soportar peor la carga su utilización es menor y además tienen un coste más reducido.
En la actualidad el engrane de las distintas marchas se realiza mediante dispositivos de sincronización o "sincronizadores" que igualan la velocidad periférica de los ejes con la velocidad interna de los piñones de forma que se consiga un perfecto engrane de la marcha sin ruido y sin peligro de posibles roturas de dentado. Es decir, las ruedas o piñones están permanentemente engranadas entre sí de forma que una gira loca sobre uno de los ejes que es el que tiene que engranar y la otra es solidaria en su movimiento al otro eje. El sincronizador tiene, por tanto, la función de un embrague de fricción progresivo entre el eje y el piñón que gira libremente sobre él. Los sincronizadores suelen ir dispuestos en cualquiera de los ejes de forma que el volumen total ocupado por la caja de cambios sea el más reducido posible. Existen varios tipos de sincronizadores de los cuales destacan: sincronizadores con cono y esfera de sincronización, sincronizadores con cono y cerrojo de sincronismo, sincronizadores con anillo elástico, etc.
El accionamiento de los sincronizadores se efectúa mediante un varillaje de cambio que actúa mediante horquillas sobre los sincronizadores desplazándolos axialmente a través del eje y embragando en cada momento la marcha correspondiente. Los dispositivos de accionamiento de las distintas marchas dependen del tipo de cambio y de la ubicación de la palanca de cambio.
La primera caja de cambios es una caja manual de tres ejes con disposición longitudinal de un vehículo de propulsión trasera. La segunda, es una caja manual de dos ejes con disposición transversal, de un vehículo con tracción delantera con tracción delantera por lo que el grupo cónico-diferencial va acoplado en la salida de la propia caja de cambios.
La situación de la caja de cambios en el vehículo dependera de la colocacion del motor y del tipo de transmisión ya sea está delantera o trasera. Estas dos disposiciones de la caja de cambios en el vehículo son las mas utilizadas, aunque existe alguna mas, como la de motor delantero longitudinal y tracción a las ruedas delanteras.
Caja de cambios manual de dos ejes: Este tipo de cajas es el más tradicional de los usados en los vehículos actuales y tiene la ventaja principal de que al transmitir el par a través de tres ejes, los esfuerzos en los piñones son menores, por lo que el diseño de éstos puede realizarse en materiales de calidad media.
En la figura inferior se muestra un corte longitudinal de una caja de cambios manual de cuatro velocidades dispuesta longitudinalmente. El par motor se transmite desde el cigüeñal del motor hasta la caja de cambios a través del embrague (Q). A la salida del embrague va conectado el eje primario (A) girando ambos de forma solidaria. De forma coaxial al eje primario, y apoyándose en éste a través de rodamiento de agujas, gira el eje secundario (M) transmitiendo el par desmultiplicado hacia el grupo cónico diferencial. La transmisión y desmultiplicación del par se realiza entre ambos ejes a través del eje intermediario (D).

El eje primario (A) del que forma parte el piñón de arrastre (B), que engrana en toma constante con el piñón (C) del árbol intermediario (D), en el que están labrados, además, los piñones (E, F y G), que por ello son solidarios del árbol intermediario (D). Con estos piñones engranan los piñones (H, I y J), montados locos sobre el árbol secundario (M), con interposición de cojinetes de agujas, de manera que giran libremente sobre el eje arrastrados por los respectivos pares del tren intermediario.
El eje primario recibe movimiento del motor, con interposición del embrague (Q) y el secundario da movimiento a la transmisión, diferencial y, por tanto, a las ruedas. Todos los ejes se apoyan en la carcasa del cambio por medio de cojinetes de bolas, haciéndolo la punta del eje secundario en el interior del piñón (B) del primario, con interposición de un cojinete de agujas.
Para transmitir el movimiento que llega desde el primario al árbol secundario, es necesario hacer solidario de este eje a cualquiera de los piñones montados locos sobre él. De esta manera, el giro se transmite desde el primario hasta el tren fijo o intermediario, por medio de los piñones de toma constante (B y C), obteniéndose el arrastre de los piñones del secundario engranados con ellos, que giran locos sobre este eje. Si cualquiera de ellos se hace solidario del eje, se obtendrá el giro de éste.
La toma de velocidad se consigue por medio de sincronizadores (O y M), compuestos esencialmente por un conjunto montado en un estriado sobre el eje secundario, pudiéndose desplazar lateralmente un cierto recorrido. En este desplazamiento sobre el estriado el sincronizador se acopla con los piñones que giran locos sobre el árbol secundario. En la figura inferior se muestra el despiece de una caja de cambios de engranajes helicoidales, con sincronizadores, similar a la descrita anteriormente. El eje primario 5 forma en uno de sus extremos el piñón de toma constante (de dientes helicoidales). Sobre el eje se monta el cojinete de bolas 4, en el que apoya sobre la carcasa de la caja de cambios, mientras que la punta del eje se aloja en el casquillo de bronce 1, emplazado en el volante motor.
En el interior del piñón del primario se apoya, a su vez, el eje secundario 19, con interposición del cojinete de agujas 6. Por su otro extremo acopla en la carcasa de la caja de cambios por medio del cojinete de bolas 28. Sobre este eje se montan estriados los cubos sincronizadores, y "locos" los piñones. Así, el cubo sincronizador 10, perteneciente a tercera y cuarta velocidades, va estriado sobre el eje secundario, sobre el que permanece en posición por los anclajes que suponen las arandelas de fijación 9, 13 y 14. En su alojamiento interno se disponen los anillos sincronizadores 7 (uno a cada lado), cuyo dentado engrana en el interior de la corona desplazable del cubo sincronizador 10. Estos anillos acoplan interiormente, a su vez, en las superficies cónicas de los piñones del primario por un lado y del secundario 11 por otro.
Cuando la corona del cubo sincronizador 10 se desplaza lateralmente a uno u otro lado, se produce el engrane de su estriado interior, con el dentado de los anillos sincronizadores 7 y, posteriormente, con el piñón correspondiente en su dentado recto (si se desplaza a la izquierda, con el piñón del primario y a la derecha con el 11 del secundario). En esta acción, y antes de lograrse el engrane total, se produce un frotamiento del anillo sincronizador con el cono del piñón, que iguala las velocidades de ambos ejes, lo que resulta necesario para conseguir el engrane. Una vez logrado éste, el movimiento es transmitido desde el piñón al cubo sincronizador y de éste al eje secundario.
En el secundario se montan locos los piñones 15 (de segunda velocidad) y 26 (de primera velocidad), con los correspondientes anillos sincronizadores 17 y cubo sincronizador. Cada uno de los piñones del secundario engrana en toma constante con su correspondiente par del tren intermediario 20, quedando acoplados como se ve en la figura superior.
En el tren intermediario se dispone un piñón de dentado recto, que juntamente con el de reenvío 23 y el formado en el cubo sincronizador de primera y segunda velocidades, constituyen el dispositivo de marcha atrás.

Funcionamiento. Constituida una caja de cambios como se ha explicado, las distintas relaciones se obtienen por la combinación de los diferentes piñones, en consecuencia con sus dimensiones.
En las cajas de cambio de tres ejes, el sistema de engranajes de doble reducción es el utilizado generalmente en las cajas de cambio, pues resulta mas compacto y presenta la ventaja sustancial de tener alineados entre si los ejes de entrada y salida. Para la obtención de las distintas relaciones o velocidades, el conductor acciona una palanca de cambios, mediante la cual, se produce el desplazamiento de los distintos cubos de sincronización (sincronizadores), que engranan con los piñones que transmiten el movimiento.
En las cajas de cambio de tres ejes, el sistema de engranajes de doble reducción es el utilizado generalmente en las cajas de cambio, pues resulta mas compacto y presenta la ventaja sustancial de tener alineados entre si los ejes de entrada y salida. Para la obtención de las distintas relaciones o velocidades, el conductor acciona una palanca de cambios, mediante la cual, se produce el desplazamiento de los distintos cubos de sincronización (sincronizadores), que engranan con los piñones que transmiten el movimiento.

En esta caja de cambios (figura superior) se produce una doble reducción cuando los piñones de "toma constante" (B y C) son de distintas dimensiones (nº de dientes). Por eso para calcular la reducción, tendremos utilizar la siguiente formula para la saber el valor de reducción. Por ejemplo en 1ª velocidad tendremos:

rt = relación de transmisión
B, C, G, J = nº de dientes de los respectivos piñones
1ª velocidad. El desplazamiento del sincronizador de 1ª/2ª (N) hacia la derecha, produce el enclavamiento del correspondiente piñón loco (I) del eje secundario, que se hace solidario de este eje. Con ello, el giro es transmitido desde el eje primario como muestra la figura inferior, obteniendose la oportuna reducción. En esta velocidad se obtiene la máxima reducción de giro, y por ello la mínima velocidad y el máximo par.


2ª velocidad. El desplazamiento del sincronizador de 1ª/2ª (N) hacia la izquierda, produce el enclavamiento del correspondiente piñón loco (J) del eje secundario, que se hace solidario de este eje. Con ello, el giro es transmitido desde el eje primario como muestra la figura inferior, obteniendose la oportuna reducción. En esta velocidad se obtiene una reducción de giro menor que en el caso anterior, por ello aumenta la velocidad y el par disminuye.

3ª velocidad. El desplazamiento del sincronizador de 3ª/4ª (O) hacia la derecha, produce el enclavamiento del correspondiente piñón loco (H) del eje secundario, que se hace solidario de este eje. Con ello, el giro es transmitido desde el eje primario como muestra la figura inferior, obteniendose la oportuna reducción. En esta velocidad se obtiene una reducción de giro menor que en el caso anterior, por ello aumenta la velocidad y el par disminuye.

4ª velocidad. El desplazamiento del sincronizador de 3ª/4ª (O) hacia la izquierda, produce el enclavamiento del correspondiente piñón de arrastre o toma constante (B) del eje primario, que se hace solidario con el eje secundario, sin intervención del eje intermediario en este caso. Con ello, el giro es transmitido desde el eje primario como muestra la figura inferior, obteniendose una conexión directa sin reducción de velocidad. En esta velocidad se obtiene una transmisión de giro sin reducción de la velocidad. La velocidad del motor es igual a la que sale de la caja de cambios, por ello aumenta la velocidad y el par disminuye.

La 5ª velocidad: Es una desmultiplicación basada en la 4ª velocidad adecuada para reducir el consumo con una leve desmultiplicación denominadola velocidad de crucero.
La 6ª y en adelante, significan una mayor gama de desmultiplicaciones que consiguen reducir el esfuerzo necesario producido en el motor para ir cambiando de velocidad, con lo que ello conlleva.
La 6ª y en adelante, significan una mayor gama de desmultiplicaciones que consiguen reducir el esfuerzo necesario producido en el motor para ir cambiando de velocidad, con lo que ello conlleva.
Marcha atrás (M.A.). Cuando se selecciona esta velocidad, se produce el desplazamiento del piñón de reenvio (T), empujado por un manguito. Al moverse el piñón de reenvio, engrana con otros dos piñones cuya particularidad es que tienen los dientes rectos en vez de inclinados como los demás piñones de la caja de cambios. Estos piñones pertenecen a los ejes intermediario y secundario respectivamente. Con esto se consigue una nueva relación, e invertir el giro del tren secundario con respecto al primario. La reducción de giro depende de los piñones situados en el eje intermediario y secundario por que el piñón de reenvio actúa únicamente como inversor de giro. La reducción de giro suele ser parecida a la de 1ª velocidad. Hay que reseñar que el piñón del eje secundario perteneciente a esta velocidad es solidario al eje, al contrario de lo que ocurre con los restantes de este mismo eje que son "locos".

En la caja de cambios explicada , se obtienen cuatro velocidades hacia adelante y una hacia atrás.
Sincronizadores

Las cajas de cambio desde hace muchos años (en lugar de otro sistema más tosco y lento) utilizan para seleccionar las distintas velocidades unos dispositivos llamados: sincronizadores, cuya constitución hace que un dentado interno ha de engranar con el piñón loco del eje secundario correspondiente a la velocidad seleccionada. Para poder hacer el acoplamiento del sincronizador con el piñón correspondiente, se comprende que es necesario igualar las velocidades del eje secundario (con el que gira solidario el sincronizador) y del piñón a enclavar, que es arrastrado por el tren intermediario, que gira a su vez movido por el motor desde el primario.
Con el vehículo en movimiento, al activar el conductor la palanca del cambio para seleccionar una nueva relación, se produce de inmediato el desenclavamiento del piñón correspondiente a la velocidad con que se iba circulando, quedando la caja en posición de punto muerto. Esta operación es sencilla de lograr, puesto que solamente se requiere el desplazamiento de la corona del sincronizador, con el que se produce el desengrane del piñón. Sin embargo, para lograr un nuevo enclavamiento, resulta imprescindible igualar las velocidades de las piezas a engranar (piñón loco del secundario y eje), es decir, sincronizar su movimiento, pues de lo contrario, se producirían golpes en el dentado, que pueden llegar a ocasionar roturas y ruidos en la maniobra.
Como el eje secundario gira arrastrado por las ruedas en la posición de punto muerto de la caja, y el piñón loco es arrastrado desde el motor a través del primario y tren intermediario, para conseguir la sincronización se hace necesario el desembrague, mediante el cual, el eje primario queda en libertad sin ser arrastrado por el motor y su giro debido a la inercia puede ser sincronizado con el del eje secundario. Por esta causa, las maniobras del cambio de velocidad deben ser realizadas desembragando el motor, para volver a embragar progresivamente una vez lograda la selección de la nueva relación deseada.

En la figura inferior tenemos un sincronizador con "fiador de bola", donde puede verse el dentado exterior o auxiliar (1) del piñón loco del eje secundario (correspondiente a una velocidad cualquiera) y el cono macho (2) formado en el. El cubo deslizante (7) va montado sobre estrías sobre el eje secundario (8), pudiendose deslizarse en él un cierto recorrido, limitado por topes adecuados. La superficie externa del cubo está estriada también y recibe a la corona interna del manguito deslizante (3), que es mantenida centrada en la posición representada en la figura, por medio de un fiador de bola y muelle (6).

Para realizar una maniobra de cambio de velocidad, el conductor lleva la palanca a la posición deseada y, con esta acción, se produce el desplazamiento del manguito deslizante, que por medio del fiador de bola (6), desplaza consigo el cubo deslizante (7), cuya superficie cónica interna empieza a frotar contra el cono del piñón loco que, debido a ello, tiende a igualar su velocidad de giro con la del cubo sincronizador (que gira solidario con el eje secundario). Instantes después, al continuar desplazandose el manguito deslizante venciendo la acción del fiador, se produce el engrane de la misma con el dentado auxiliar del piñón loco sin ocasionar golpes ni ruidos en esta operación, dado que las velocidades de ambas piezas ya están sincronizadas. En estas condiciones, el piñón loco queda solidario del eje secundario, por lo que al producirse la acción de embragado, será arrastrado por el giro del motor con la relación seleccionada.
Para conseguir reducciones o desmultiplicaciones, o saber cómo se producen, se tiene en cuenta una relación muy sencilla:
N1 · Z1 = N2 · Z2
Esta es una relación que se produce siempre, es una relación física. Quiere decri que el resultado de multiplicar el número de revoluciones y los dientes del piñon de entrada es igual al resultado de multiplicar el número de revoluciones y el número de dientes del piñón de salida.
Si despejamos queda que la relación de transmsión equivale a:
Rt = N1/N2 = Z2/Z1
También podemos relacionarla con los radios:
Rt = N1/N2 = Z2/Z1 = R2/R1
La relación de transmisión total equivale a :
Rtt= Rt1 · Rt2· Rt3 · ....... Rtn
Si nos encontramos con lo siguiente:
Rtt = R2/R1 · R3/R2 · R4/R3 reducimos a Rtt = R2/R3
Rtt = N1/N2 · N2/N3 · N3/N4 netonces eliminamos las intermedias y nos queda
Rtt = N1/N4
El desmontaje y las comprobaciones de una caja de cambios se deben realizar según se indica el manual del fabricante.
enlace: CAMBIOS DE DOS EJES
La web de donde se ha completado esta entrada es http://www.aficionadosalamecanica.com/caja-cambios1.htm
EJEMPLO DE INDICACIONES DE MONTAJE Y DESMONTAJE
MONTAJE DE RODAMIENTOS TRAS CALENTARLOS:

SAE 90

Sacamos el rodamiento del baño caliente y lo introducimos en su eje.


Calentar y enfriar nos puede ayudar a introducir rodamientos o sacar ejes.


web con algunos detalles de CAJAS DE CAMBIO de F1
Las motos también montan cajas de cambios con engranajes de dentado recto, debido a los exfuerzos que sufren en los camboios y acleraciones bruscas (y por economía), esto se entiende claramente si se piensa en una moto de competición de cross.

Los engranajes cilíndricos de dentado helicoidal están caracterizados por su dentado oblicuo con relación al eje de rotación. En estos engranajes el movimiento se transmite de modo igual que en los cilíndricos de dentado recto, pero con mayores ventajas. Los ejes de los engranajes helicoidales pueden ser paralelos o cruzarse, generalmente a 90º.
Ventajas:
Para conseguir reducciones o desmultiplicaciones, o saber cómo se producen, se tiene en cuenta una relación muy sencilla:
N1 · Z1 = N2 · Z2
Esta es una relación que se produce siempre, es una relación física. Quiere decri que el resultado de multiplicar el número de revoluciones y los dientes del piñon de entrada es igual al resultado de multiplicar el número de revoluciones y el número de dientes del piñón de salida.
Si despejamos queda que la relación de transmsión equivale a:
Rt = N1/N2 = Z2/Z1
También podemos relacionarla con los radios:
Rt = N1/N2 = Z2/Z1 = R2/R1
La relación de transmisión total equivale a :
Rtt= Rt1 · Rt2· Rt3 · ....... Rtn
Si nos encontramos con lo siguiente:
Rtt = R2/R1 · R3/R2 · R4/R3 reducimos a Rtt = R2/R3
Rtt = N1/N2 · N2/N3 · N3/N4 netonces eliminamos las intermedias y nos queda
Rtt = N1/N4
El desmontaje y las comprobaciones de una caja de cambios se deben realizar según se indica el manual del fabricante.
enlace: CAMBIOS DE DOS EJES
La web de donde se ha completado esta entrada es http://www.aficionadosalamecanica.com/caja-cambios1.htm
EJEMPLO DE INDICACIONES DE MONTAJE Y DESMONTAJE
MONTAJE DE RODAMIENTOS TRAS CALENTARLOS:

SAE 90

Sacamos el rodamiento del baño caliente y lo introducimos en su eje.


Calentar y enfriar nos puede ayudar a introducir rodamientos o sacar ejes.
SOBRE ENGRANAJES RECTOS Y HELECOIDALES
ENGRANAJES RECTOS
Un negranaje es una rueda dentada que sirve para transmitir movimiento circular mediante contacto. Los engranajes cilíndricos rectos son el tipo de engranaje más simple y corriente que existe. Se utilizan generalmente para velocidades pequeñas y medias; a grandes velocidades, si no son rectificados, o ha sido corregido su tallado, producen ruido cuyo nivel depende de la velocidad de giro que tengan.
A pesar de todo, debido a que los engranajes helecoidales producen una sobrecarga axial, en competición resulta comveniente usar engranajes de dentado recto.
Ojo, esto no quiere decir que todas las motos tengan cajas de cambios con dentado recto:
ENGRANAJES HELECOIDALES
Ventajas:
- Presentan un comportamiento más silencioso que el de los dientes rectos usándolos entre ejes paralelos.
- Poseen una mayor relación de contacto debido al efecto de traslape de los dientes.
- Pueden transmitir mayores cargas a mayores velocidades debido al contacto helecoidal gradual que poseen
Los engranajes helicoidales tienen la ventaja que transmiten más potencia que los rectos, y también pueden transmitir más velocidad, son más silenciosos y más duraderos; además, pueden transmitir el movimiento de ejes que se corten. Tiene algún inconveniente como que son más caros de fabricar y la carga axial que producen. Para eliminar el empuje axial el dentado puede hacerse doble helicoidal.

Engranajes helicoidales dobles
.jpg)
Este tipo de engranajes fueron inventados por Citroën y el objetivo que consiguen es eliminar el empuje axial que tienen los engranajes helicoidales simples. Los dientes de los dos engranajes forman una especie de V.
Los engranajes dobles son una combinación de hélice derecha e izquierda. El empuje axial que absorben los apoyos o cojinetes de los engranajes helicoidales es una desventaja de ellos y ésta se elimina por la reacción del empuje igual y opuesto de una rama simétrica de un engrane helicoidal doble.
Un engrane de doble hélice sufre únicamente la mitad del error de deslizamiento que el de una sola hélice o del engranaje recto. Toda discusión relacionada a los engranes helicoidales sencillos (de ejes paralelos) es aplicable a los engranajes helicoidales dobles, exceptuando que el ángulo de la hélice es generalmente mayor para los helicoidales dobles, puesto que no hay empuje axial.
Los engranajes dobles son una combinación de hélice derecha e izquierda. El empuje axial que absorben los apoyos o cojinetes de los engranajes helicoidales es una desventaja de ellos y ésta se elimina por la reacción del empuje igual y opuesto de una rama simétrica de un engrane helicoidal doble.
Un engrane de doble hélice sufre únicamente la mitad del error de deslizamiento que el de una sola hélice o del engranaje recto. Toda discusión relacionada a los engranes helicoidales sencillos (de ejes paralelos) es aplicable a los engranajes helicoidales dobles, exceptuando que el ángulo de la hélice es generalmente mayor para los helicoidales dobles, puesto que no hay empuje axial.
MAS DE FÓRMULA 1 ...
En princio a la hora de diseñar no deberían diferir demasiado la Fórmula 1 de la calle, en lo que concierne a las cajas de cambio y su tecnología. Pensemos que desde 1994, la eficiencia de las cajas de cambios de los monoplazas de F1 han mejorado su eficiencia desde el 92% hasta unas cifras alrededor del 98%.
Uno de los campos en los que se ha mejorado más el rendimiento de las cajas de cambio es en la lubricación. En 1994, las cajas necesitaban tres litros de aceite, mientras que en la actualidad con menos de un litro ya es suficiente. Además, los nuevos materiales han hecho que de los 60 kg de peso se haya pasado a los 40 kg que pesaban las cajas en 2005.
Otro aspecto que pone de manifiesto los avances conseguidos en el desarrollo de las cajas de cambios es el tiempo en el que se tarda en cambiar de marcha. De los 100 ms de 1995 se ha pasado a los 30 ms de 2005, y en la actualidad, con las cajas seamless ultrarápidas que ya montan todos los equipos en sus monoplazas, estos tiempos son prácticamente nulos.
Todos estos desarrollos se han ido incorporando a los coches de calle de Ferrari poco a poco, y actualmente se está trabajando especialmente con “la reducción del peso del conjunto, la mejora en la eficiencia mecánica y la velocidad en el cambio de marchas. Para las nuevas generaciones de cajas de cambios de los coches de calle estamos intentando tener un diseño más compacto con una mejor integración de los componentes”. Hoy por hoy, el coche que más rápido cambia de marchas es el 430 Scuderia, que con el sistema Sofast 5 cambia las marchas en 60ms.
Enlaces web explicando el funcionamiento de las cajas de cambio en F1
Sistemas para cambios de competición
Cambio velocidades F1
Uno de los campos en los que se ha mejorado más el rendimiento de las cajas de cambio es en la lubricación. En 1994, las cajas necesitaban tres litros de aceite, mientras que en la actualidad con menos de un litro ya es suficiente. Además, los nuevos materiales han hecho que de los 60 kg de peso se haya pasado a los 40 kg que pesaban las cajas en 2005.
Otro aspecto que pone de manifiesto los avances conseguidos en el desarrollo de las cajas de cambios es el tiempo en el que se tarda en cambiar de marcha. De los 100 ms de 1995 se ha pasado a los 30 ms de 2005, y en la actualidad, con las cajas seamless ultrarápidas que ya montan todos los equipos en sus monoplazas, estos tiempos son prácticamente nulos.
Todos estos desarrollos se han ido incorporando a los coches de calle de Ferrari poco a poco, y actualmente se está trabajando especialmente con “la reducción del peso del conjunto, la mejora en la eficiencia mecánica y la velocidad en el cambio de marchas. Para las nuevas generaciones de cajas de cambios de los coches de calle estamos intentando tener un diseño más compacto con una mejor integración de los componentes”. Hoy por hoy, el coche que más rápido cambia de marchas es el 430 Scuderia, que con el sistema Sofast 5 cambia las marchas en 60ms.
Enlaces web explicando el funcionamiento de las cajas de cambio en F1
Sistemas para cambios de competición
Cambio velocidades F1
miércoles, 10 de diciembre de 2014
RESISTENCIA OPUESTA AL AVANCE DE UN VEHÍCULO

El avance del vehículo se consigue pues gracias a los sistemas de transmisión en sí, aunque hay que tener en cuenta que que este "avance" es frenado por diversas fuerzas o resistencias que se oponene a el. Estas son principalmente: resistencia a la rodadura, resistencia al aire , resisitencia del rozamiento mecánico, resistencia de inercia y resistencia por pendiente.

RESISTENCIA A LA RODADURA
La resistencia a la rodadura, a veces llamada rozamiento de rodadura o arrastre rodante, es la resistencia que se produce cuando un objeto redondo como una pelota o neumático rueda sobre una superficie plana, en línea recta con un movimiento de velocidad constante. Es causada principalmente por la deformación del objeto, la deformación de la superficie, o ambas cosas.
Otros factores contribuyentes incluyen el radio de la rueda, la velocidad de avance, adhesión a la superficie, y la relación micro-deslizamiento entre las superficies de contacto. Depende en gran medida del material de la rueda o del neumático y el tipo de suelo.
Por ejemplo, la goma dará una mayor resistencia a la rodadura de acero. Además, la arena en el suelo le dará más resistencia a la rodadura de hormigón. Cualquier movimiento de las ruedas de los vehículos poco a poco se hace más lento debido a la resistencia a la rodadura incluida la de los rodamientos, como un tren de coches con ruedas de acero que se mueven en rieles de acero que ruedan más que un autobús de la misma masa con neumáticos de caucho que se mueven en el asfalto. El coeficiente de resistencia a la rodadura es generalmente mucho menor para los neumáticos o las bolas que el coeficiente de fricción por deslizamiento.
La principal causa de resistencia a la rodadura es de histéresis. Una de las características de un material es que es deformable, tal que la energía de deformación es mayor que la energía de la recuperación. El compuesto de caucho de los neumáticos en las exposiciones es de diéresis. A medida que el neumático gira bajo el peso del vehículo, experimenta ciclos repetidos de la deformación y la recuperación, y la pérdida de energía se disipan como calor de histéresis. La histéresis es la principal causa de pérdidas de energía asociadas con resistencia a la rodadura y se atribuye a las características viscoelásticas de la goma.
Así, los materiales que se flexionan más se recuperan poco a poco, como el caucho, exhiben resistencia a la rodadura más de los materiales que se flexionan menos, como el acero, o que se recuperan más rápidamente, como la sílice.
Los neumáticos de baja calidad suelen incorporar sílice en lugar de carbón negro en su compuesto de caucho para reducir la frecuencia de histéresis baja, sin comprometer la tracción.
Varios factores afectan la magnitud de la resistencia a la rodadura de un neumático:El radio de la rueda, la velocidad de avance, adhesión a la superficie, y la relación micro-deslizamiento.
Material – rellenos diferentes y polímeros en la composición de los neumáticos puede mejorar la tracción y reducir la histéresis. La sustitución de algunos de carbono negro, con precio de sílice de mayor silano es una forma común de reducir la resistencia a la rodadura.
Las dimensiones con resistencia a la rodadura de los neumáticos están relacionadas con la flexión de los flancos y el área de contacto del neumático. Por ejemplo, a la misma presión, más amplio neumáticos de la bicicleta menos flexibles en las paredes mientras ruedan y por lo tanto tienen una menor resistencia a la rodadura (aunque superior la resistencia del aire).
Medida de la inflado – Baja la presión en los resultados de los neumáticos en más flexión de los flancos y una mayor resistencia a la rodadura. Esta conversión de energía aumenta la resistencia a las paredes laterales y también puede producir un sobrecalentamiento.
Para realizar el cálculo de la resistencia a la rodadura de un vehículo en movimiento dbemos etener en cuenta: peso a soportar por la rueda, tipo de terreno, dimensiones del neumático, aumento del coeficiente de rodadura con la carga, velocidad, aceleración, baja presión de neumáticos, etc.
Para calcular sencillamente la resistencia a la rudaduro debemos multiplicar el peso del vehículo por el coeficiente de rodadura.
Rr= peso vehículo x cte rodadura
El coeficiente de rodadura se calcula:
Cte rodadura = 1/2 longitud huella / radio rueda
Para el coeficiente de rodadura debemos tener en cuenta detalles como son presión de inflado (influye en radio total, velocidad, superficie, etc.).
Videos interesantes, conviene verlos porqué tienen detalles importantes:
RESISTENCIA DEL AIRE
Esta es la fuerza que sufre un cuerpo al moverse a través del aire, y en particular a la componente de esa fuerza en la dirección de la velocidad relativa del cuerpo respecto del medio. La resistencia es siempre de sentido opuesto al de dicha velocidad, por lo que habitualmente se dice de ella que, de forma análoga a la de fricción, es la fuerza que se opone al avance de un cuerpo a través del aire.
Coeficiente aerodinámico (Cx), s la expresión de la resistencia que ofrece un cuerpo a moverse dentro de un fluido por razón de su forma. Se toma como un coeficiente adimensional, a partir de la resistencia que hace una plancha cuadrada de metal, de 1 m de lado. Al coeficiente de la plancha se le atribuye el valor 1, y a otros cuerpos se les atribuye un valor como referencia a ese.
Hasta cierto punto, el Cx es independiente del tamaño del cuerpo y de la velocidad del fluido. A partir de cierto punto, puede haber variaciones en el Cx por cualquiera de las dos causas. Por esta razón, cuando se trabaja con modelos a escala para estudiar la aerodinámica de una forma, esta escala no suele ser menor de 1 a 5.
El Cx en la mayoría de los coches de producción está entre 0,25 y 0,40; algunos coches experimentales o prototipos bajan de 0,20. El Cx es uno de los datos necerarios para calcular la resistencia aerodinámica., que es una fuerza. El otro dato es un área de referencia que, en coches de producción, es equivalente a la superficie frontal. La razón por la que se escoge la superficie frontal es que se supone que por detrás del plano de mayor área es donde se produce la separación del flujo aerodinámico de la carrocería; esta separación del flujo es la principal causa de resistencia aerodinámica en coche de producción.
Al multiplicar el coeficiente de penetración Cx, tomado como número adimensional, por la superficie frontal expresada en m², queda un valor de resistencia aerodinámica SCx, expresado en también m².
Se llama coeficiente de penetración «Cx» porque la x indica una dirección en un eje de tres coordenadas; al coeficiente vertical o de elevación se le denomina «Cz»por la misma causa. Otra forma de referirse al coeficiente de penetración es Cd, donde la d es la inicial de la palabra inglesa «drag»; según esta nomenclatura, el coeficiente de elevación es Cl, por «lift».
Para calcular la resistencia al aire:
Resistencia aire = presión resistente (vehiculo) x superficie (vehículo) x cte aerodinámcio
Cte aerodinámico = Resistencia del aire / 1/2 · d · V2 · s
(d = densidad, V2 = velocidad al cuadrado)
Imagenes clave de vehículos de competición para entender un poco el efecto de la resistencia aerodinámica:

La aerodinámica es una rama de la mecánica que no para de evolucionar.







El objetivo de la aerodinámica es reducir al máximo la resistencia contra el aire (en el caso de F1 el vehículo debe pegarse lo máximo posible al axfalto de manera que entre el mínimo aire posible por debajo y consiga mayor adeherencia).




El cálculo del coeficiente aerodinámico resulta laborioso y se hace imprescidibles los túneles de viento y los programas informaticos diseñados a tal fin.
RESISTENCIA DEL ROZAMIENTO MECÁNICO


Consideramos que la potencia útil de un vehículo es el resultado de multiplicar el rendimiento mecánico por l apotencia aplicada al embrague o potencia al freno.
Potencia útil = potencia aplicada en embrague x rendimiento mecánico
RESISTENCIA DE LA INERCIA
La inercia es la propiedad que tienen los cuerpos de permanecer en su estado de reposo o movimiento, mientras no se aplique sobre ellos alguna fuerza, o la resistencia que opone la materia al modificar su estado de reposo o movimiento. Como consecuencia, un cuerpo conserva su estado de reposo o movimiento rectilíneo uniforme si no hay una fuerza actuando sobre él.
En física se dice que un sistema tiene más inercia cuando resulta más difícil lograr un cambio en el estado físico del mismo

Resistencia de la inercia = masa x aceleración
RESISTENCIA DEBIDA A LA PENDIENTE
Debido al peso del vehículo subiendo una cuesta se produce una resistencia que hay que vencer para poder superarla. Justo al contrario que si bajaramos una pendiente.
La fuerza generada al superar pendientes depende del peso del vehículo y del ángulo
de la pendiente donde α:Fuerza pendiente = p · sen α
La pendiente de una carretera o camino está determinada por la relación que
existe entre la altura superada y la longitud recorrida
sen α = altura / longitud recorrida de la pendiente
sen α · 100 = pendiente en %
La fuerza que produce la masa del vehículo por la gravedad (p) la soportan principalmente los neumáticos. En los ascensos o descensos esta fuerza se descompone en dos, una que es soportada por los neumáticos y otra que empuja al vehículo en sentido contrario al de la marcha en el ascenso



Aquí un señor que no se si tiene en cuenta la
aerodinámica
domingo, 7 de diciembre de 2014
LA TRACCIÓN EN LOS VEHÍCULOS

La fuerza y movimientos generados por un vehículo para que este se mueva, provienen de un sistema motoprupulsor y un sistema de transmisión que pueden tener muy distitntas configuraciones. Veamos distintos ejemplos. Aqui no vamos a destacar detalles como que sean hibridos, electricos o por combustión interna.
TRACCIÓN DELANTERA Y GRUPOMOTOPROPULSOR DELANTERO.

Enlace de las imagenes
TRACCCIÓN TRASERA Y MOTOR TRASERO.


TRACCIÓN TRASERA Y MOTOR DELANTERO

Enlace de las imagenes
Como hay tantas composiciones, también nos podemos encontrar con la caja de cambios separada del motor:

TRACCIÓN 4X4 Y MOTOR DELANTERO/INTERMEDIO/TRASERO



VEHÍCULOS CICLOMOTORES
Sistema de transmsión por correa o cadena

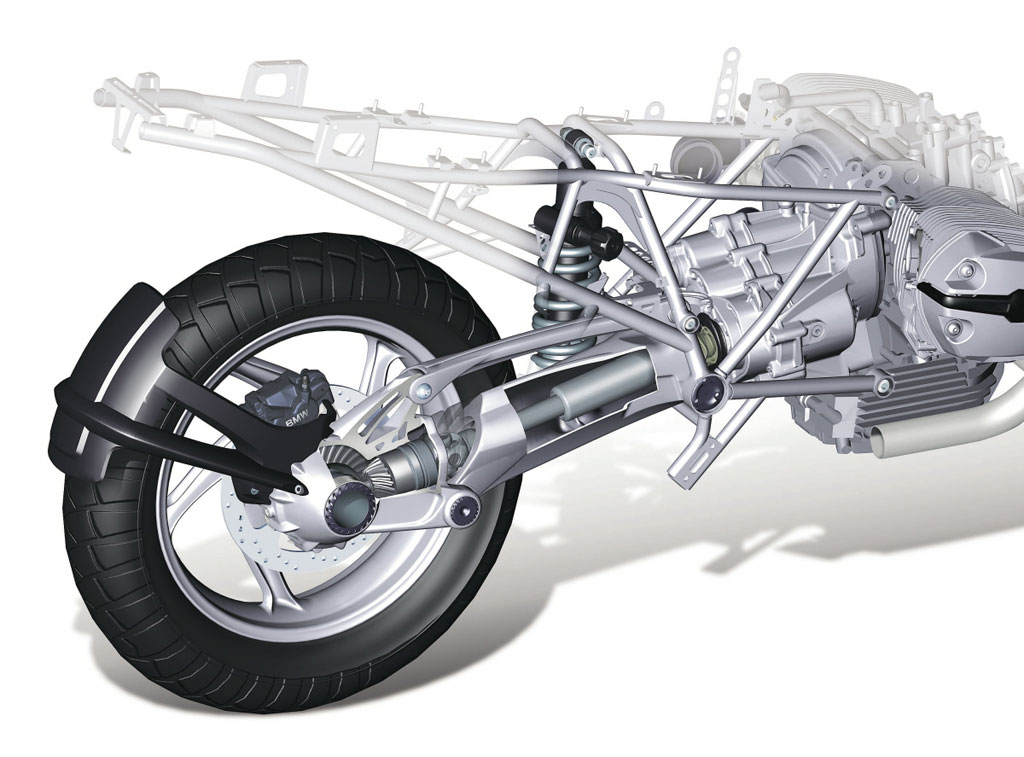
Sistema de transmisión por Cardan
VEHÍCULOS INDUSTRIALES Y AGRÍCOLAS
La tracción en vehículos agrícolas suele ser trasera o 4x4, según las necesidades de trabajo.


En vehículos industriales y agricolas la disposición de la transmsión es variadisima, hasta el punto que podemos realizar cualquier estructuración.

ENLACE A TRANSMISIONES PARA VEHÍCULOS INDUSTRIALES
En vehículos industriales y camiones pdemos tener distintas cofiguraciones teniendo en cuenta los ejes.
TRANSMISIONES HIDRÁULICAS ( por bombas y motores hidráulicos):
Dumper

Motor hidráulico
{kind=link}

Suscribirse a:
Comentarios (Atom)